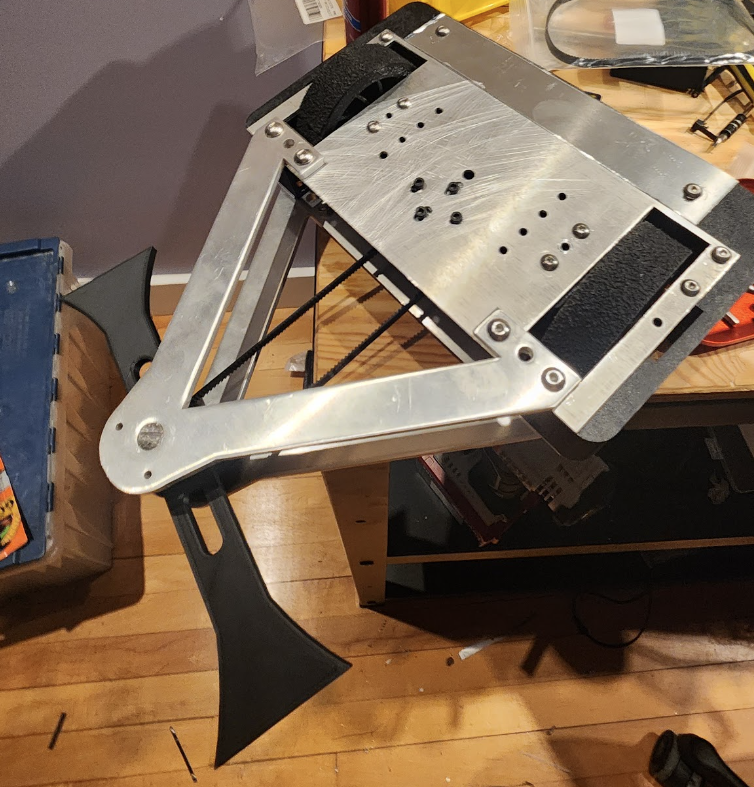
I plan to build this robot completely from scratch. My current idea utilizes a horizontal spinning metal blade as its main way of electing damage.Spinning this wheel up via a belt drive powered by an internal motor. Bilateral internal wheels will be its method of movement allowing it to move if it becomes flipped and protecting them from damage. The top and bottom of the robot will be made from Aluminum and the middle will be 3D printed TPU, TPU is a rubbery material that allows impact abortion compared to brittle PLA. The shop that I work at has contacts for all types of metals and TPU is readily available online. Like most combat sports, combat robotics uses weight classes to differentiate between robots, these classes vary between competitions but the most common are: 1LB antweight, 3LB beetleweight, and 30LB featherweight. I am planning on making my robot beetleweight
